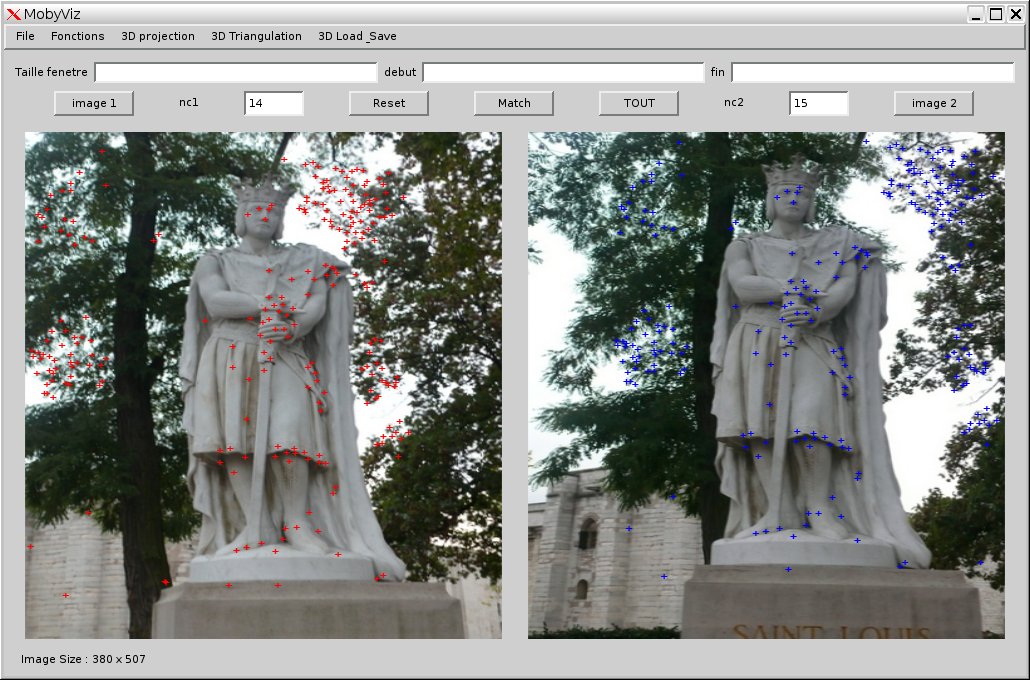
Point matching and outliers suppression
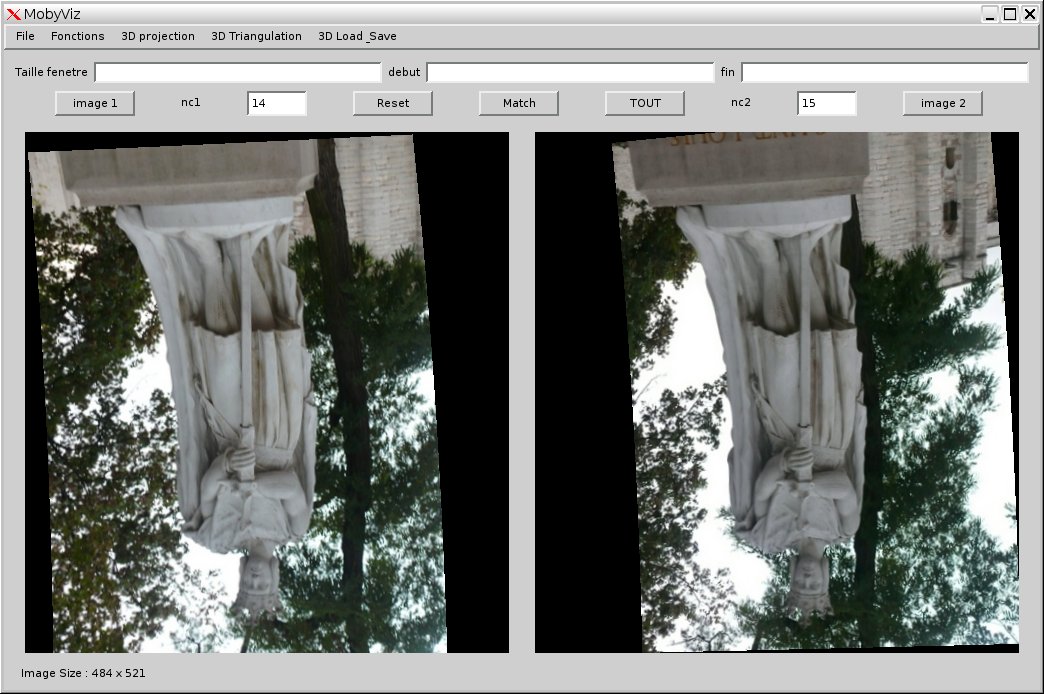
Epipolar rectification
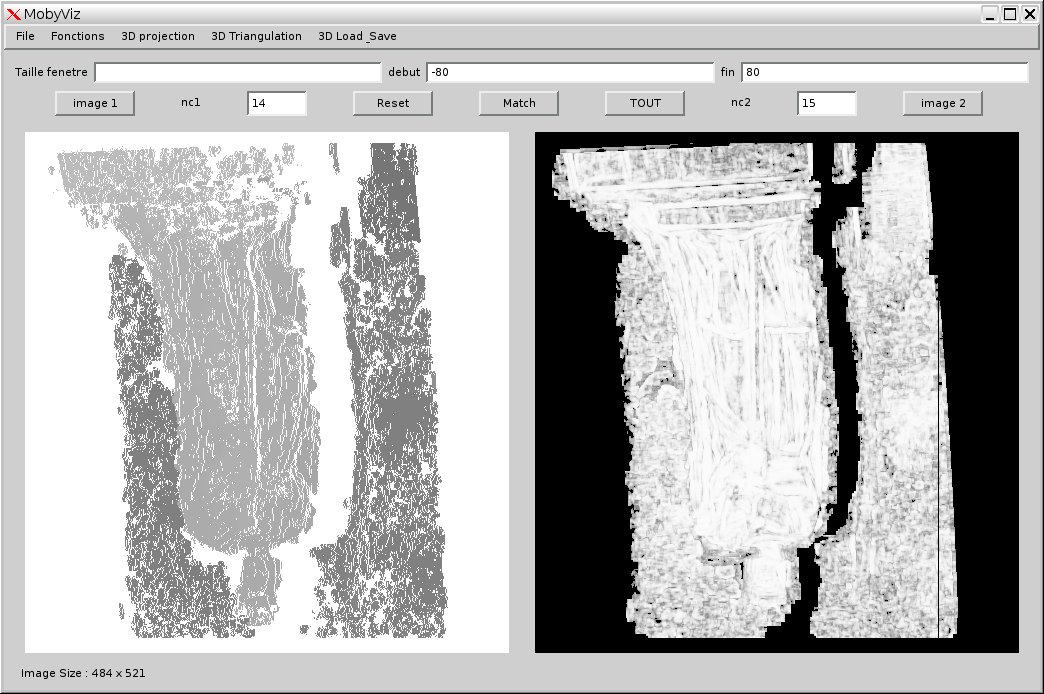
On the left the disparity map and and the right the confidense map
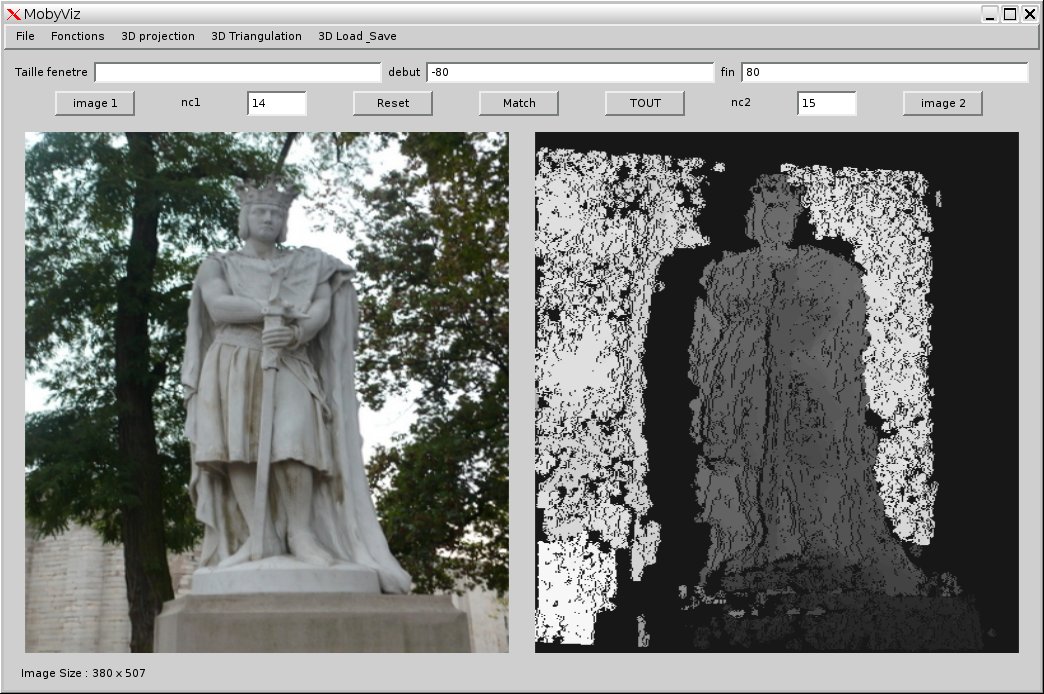
Disparity map derectify for comparison on the original image
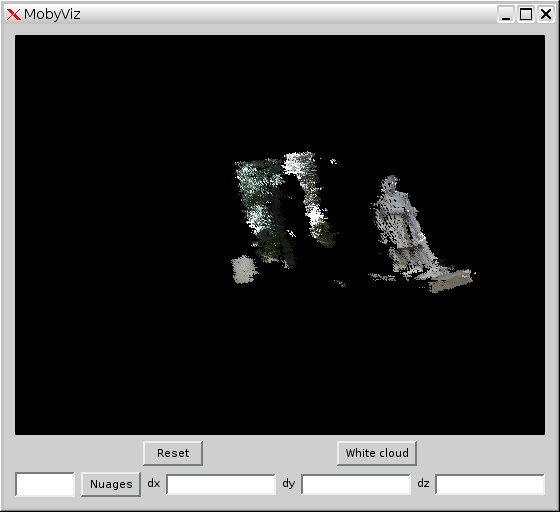
3D point cloud
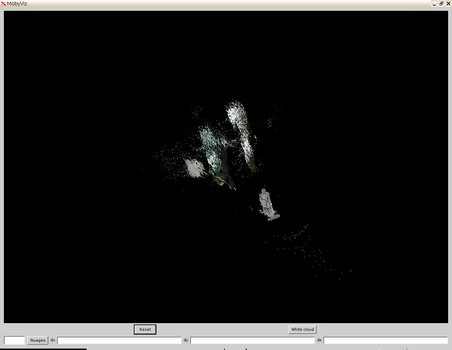
3D point cloud